 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Spherical Wavefront: Near-Field Channel Estimation Under Wavefront Anisotropy
May 21, 2026Extremely large aperture arrays (ELAAs) and millimeter-wave (mmWave) technologies are essential for achieving high data rates in future wireless communication systems. To perform precise beamforming, these systems require accurate channel estimation, in which the near-field wavefront curvature effect must be taken into account. Existing channel estimation methods rely on the spherical wavefront channel (SWC) model, which is suitable for near-field propagation with point sources, scatterers, and reflection planes. However, when a near-field curved reflecting surface exists, the wavefront of the reflected wave becomes anisotropic rather than spherical, causing the SWC model to become inaccurate. To address this problem, in this paper, we formulate a parameterized model for the anisotropic wavefront channel (AWC). Using this model, we propose a channel estimation algorithm based on physical parameter recovery for the AWC. Simulation results reveal that the AWC no longer retains sparsity in the angle-distance domain. Furthermore, the results demonstrate how different physical characteristics of the propagation scenario affect the degree of wavefront anisotropy, and confirm the effectiveness of our proposed algorithm in AWC scenarios.
MACAW: Matching-free Acquisition of Channels with Anisotropic Wavefronts
Apr 27, 2026The escalating data rate demands of future wireless communications necessitate the deployment of extremely large aperture arrays (ELAA) at base stations. In such configurations, wireless channel characteristics are profoundly influenced by the near-field wavefront curvature of electromagnetic waves. While numerous channel estimation algorithms have been proposed for standard spherical wavefronts, practical electromagnetic waves reflected by curved surfaces exhibit anisotropic wavefront curvature. This anisotropy causes a severe deviation from the ideal spherical model, leading to substantial accuracy degradation in existing channel estimation techniques. To tackle this challenge, this paper proposes a novel, low-complexity channel estimation algorithm tailored for the anisotropic wavefront channel (AWC), termed MACAW. We first mathematically formulate the AWC model. Subsequently, rather than relying on conventional matching-based framework, we develop an matching-free algorithm based on harmonic analysis. This approach successfully circumvents the prohibitive computational overhead associated with massive dictionary construction and matching pursuits. Simulation results demonstrate that the proposed algorithm significantly outperforms existing approaches in AWC scenarios, while maintaining effectiveness in spherical wave channels. Furthermore, achieving an identical estimation accuracy, our method drastically reduces pilot overhead and time complexity, and exhibits enhanced robustness in low signal-to-noise ratio (SNR) regimes.
Constructing Knowledge Map for MIMO-OFDM Clustered Channel Estimation
Feb 26, 2026Channel knowledge map (CKM) exploits environ-ment information to assist channel estimation during communi-cation. For clustered channels, which represent a typical type ofwireless propagation environment, there has been no researchdevoted to designing an appropriate CKM to enhance theirestimation. To exploit environment information for clusteredchannel, improve channel estimation accuracy and reduce pilotoverhead, we propose ClusterCKM, a CKM providing the rangeof clustered multipath parameters for any pair of transmitter-receiver links in the region of interest. Firstly, we construct Clus-terCKM through estimating the spatial range of scatterer clustersfrom historical channel information. From these spatial range ofscatterer clusters, ClusterCKM infers the range of multipathparameters for the target link. Furthermore, a ClusterCKM-based channel estimation algorithm is developed to utilize theparameter range provided by ClusterCKM. Simulation resultsshow that, more accurate channel estimation can be achievedand pilot overhead can also be reduced by ClusterCKM and theClusterCKM-based estimation algorithm.
Interaction-aware Conformal Prediction for Crowd Navigation
Feb 10, 2025During crowd navigation, robot motion plan needs to consider human motion uncertainty, and the human motion uncertainty is dependent on the robot motion plan. We introduce Interaction-aware Conformal Prediction (ICP) to alternate uncertainty-aware robot motion planning and decision-dependent human motion uncertainty quantification. ICP is composed of a trajectory predictor to predict human trajectories, a model predictive controller to plan robot motion with confidence interval radii added for probabilistic safety, a human simulator to collect human trajectory calibration dataset conditioned on the planned robot motion, and a conformal prediction module to quantify trajectory prediction error on the decision-dependent calibration dataset. Crowd navigation simulation experiments show that ICP strikes a good balance of performance among navigation efficiency, social awareness, and uncertainty quantification compared to previous works. ICP generalizes well to navigation tasks under various crowd densities. The fast runtime and efficient memory usage make ICP practical for real-world applications. Code is available at https://github.com/tedhuang96/icp.
Channel Correlation Matrix Extrapolation Based on Roughness Calibration of Scatterers
Sep 17, 2024To estimate the channel correlation matrix (CCM) in areas where channel information cannot be collected in advance, this paper proposes a way to spatially extrapolate CCM based on the calibration of the surface roughness parameters of scatterers in the propagation scene. We calibrate the roughness parameters of scene scatters based on CCM data in some specific areas. From these calibrated roughness parameters, we are able to generate a good prediction of the CCM for any other area in the scene by performing ray tracing. Simulation results show that the channel extrapolation method proposed in this paper can effectively realize the extrapolation of the CCM between different areas in frequency domain, or even from one domain to another.
Bridge the Performance Gap in Peak-hour Series Forecasting: The Seq2Peak Framework
Jul 04, 2023



Peak-Hour Series Forecasting (PHSF) is a crucial yet underexplored task in various domains. While state-of-the-art deep learning models excel in regular Time Series Forecasting (TSF), they struggle to achieve comparable results in PHSF. This can be attributed to the challenges posed by the high degree of non-stationarity in peak-hour series, which makes direct forecasting more difficult than standard TSF. Additionally, manually extracting the maximum value from regular forecasting results leads to suboptimal performance due to models minimizing the mean deficit. To address these issues, this paper presents Seq2Peak, a novel framework designed specifically for PHSF tasks, bridging the performance gap observed in TSF models. Seq2Peak offers two key components: the CyclicNorm pipeline to mitigate the non-stationarity issue, and a simple yet effective trainable-parameter-free peak-hour decoder with a hybrid loss function that utilizes both the original series and peak-hour series as supervised signals. Extensive experimentation on publicly available time series datasets demonstrates the effectiveness of the proposed framework, yielding a remarkable average relative improvement of 37.7\% across four real-world datasets for both transformer- and non-transformer-based TSF models.
BiTe-GCN: A New GCN Architecture via BidirectionalConvolution of Topology and Features on Text-Rich Networks
Oct 23, 2020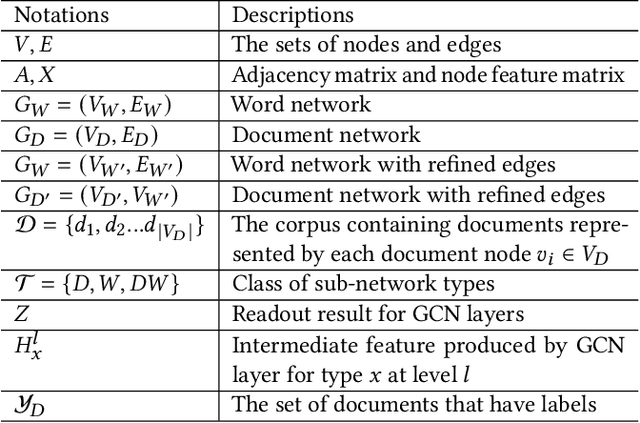
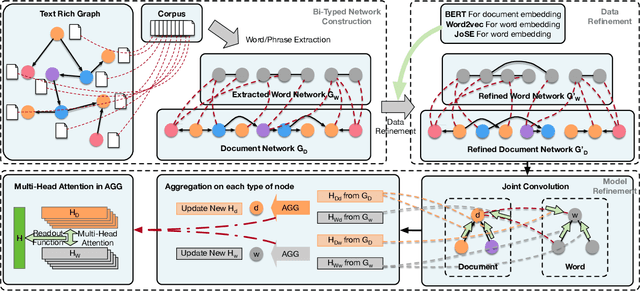
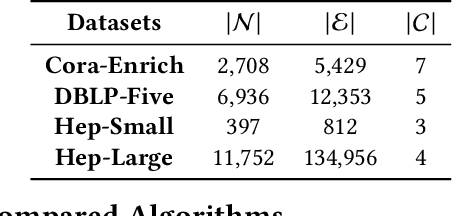
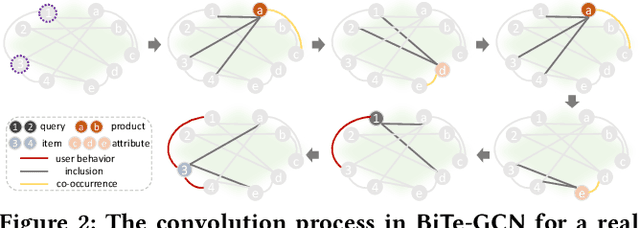
Graph convolutional networks (GCNs), aiming to integrate high-order neighborhood information through stacked graph convolution layers, have demonstrated remarkable power in many network analysis tasks. However, topological limitations, including over-smoothing and local topology homophily, limit its capability to represent networks. Existing studies only perform feature convolution on network topology, which inevitably introduces unbalance between topology and features. Considering that in real world, the information network consists of not only the node-level citation information but also the local text-sequence information. We propose BiTe-GCN, a novel GCN architecture with bidirectional convolution of both topology and features on text-rich networks to solve these limitations. We first transform the original text-rich network into an augmented bi-typed heterogeneous network, capturing both the global node-level information and the local text-sequence information from texts. We then introduce discriminative convolution mechanisms to performs convolutions of both topology and features simultaneously. Extensive experiments on text-rich networks demonstrate that our new architecture outperforms state-of-the-art by a breakout improvement. Moreover, this architecture can also be applied to several e-commerce searching scenes such as JD\ searching. The experiments on the JD dataset validate the superiority of the proposed architecture over the related methods.
Learning to Communicate: A Machine Learning Framework for Heterogeneous Multi-Agent Robotic Systems
Dec 13, 2018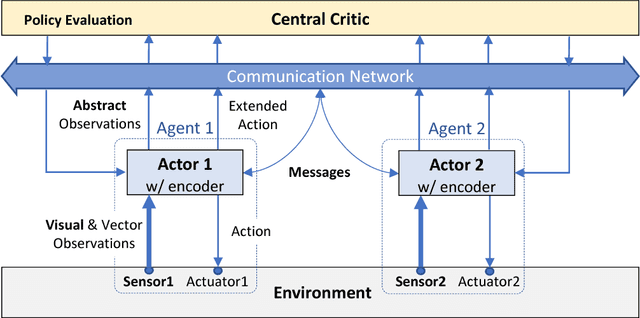
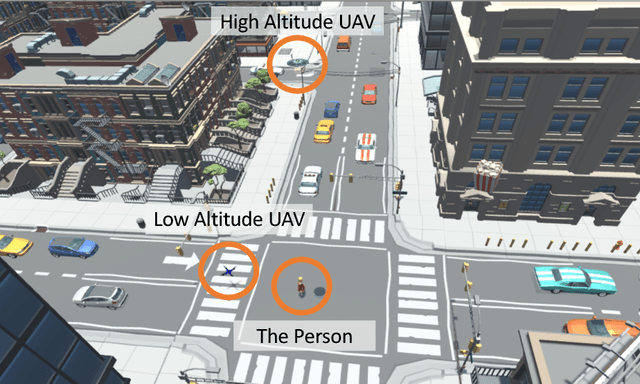
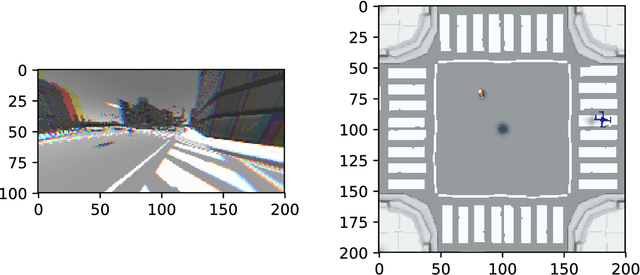
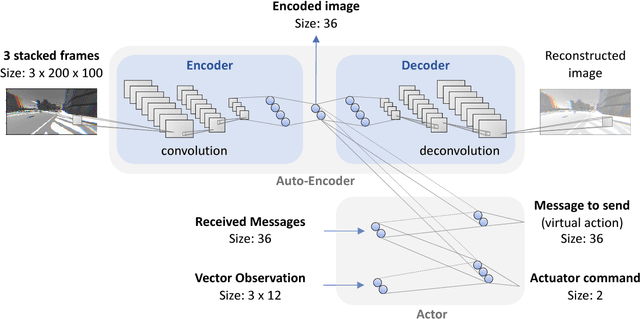
We present a machine learning framework for multi-agent systems to learn both the optimal policy for maximizing the rewards and the encoding of the high dimensional visual observation. The encoding is useful for sharing local visual observations with other agents under communication resource constraints. The actor-encoder encodes the raw images and chooses an action based on local observations and messages sent by the other agents. The machine learning agent generates not only an actuator command to the physical device, but also a communication message to the other agents. We formulate a reinforcement learning problem, which extends the action space to consider the communication action as well. The feasibility of the reinforcement learning framework is demonstrated using a 3D simulation environment with two collaborating agents. The environment provides realistic visual observations to be used and shared between the two agents.